
Acht I/O-Module, ein Hub und Pub/Sub-Anbindung an Google Cloud in Echtzeit über HTTPS. Wie Voldeno-Module jeden Motor und Sensor der Fischertechnik Training Factory-Demo für Google Manufacturing Data Engine in Las Vegas ansteuerten.
# Voldeno steuerte die Fischertechnik-Fabrikdemo auf der Google Cloud Next '26

Die Google Cloud Next '26 fand vom 22. bis 24. April 2026 in Las Vegas statt, mit mehr als 32.000 Teilnehmern, über 700 Breakout-Sessions und mehr als 490 Sponsoren. Das zentrale Thema war das agentische Unternehmen: Googles Wette auf KI-Agenten, die im Auftrag von Organisationen über Software, Daten und physische Abläufe hinweg handeln.

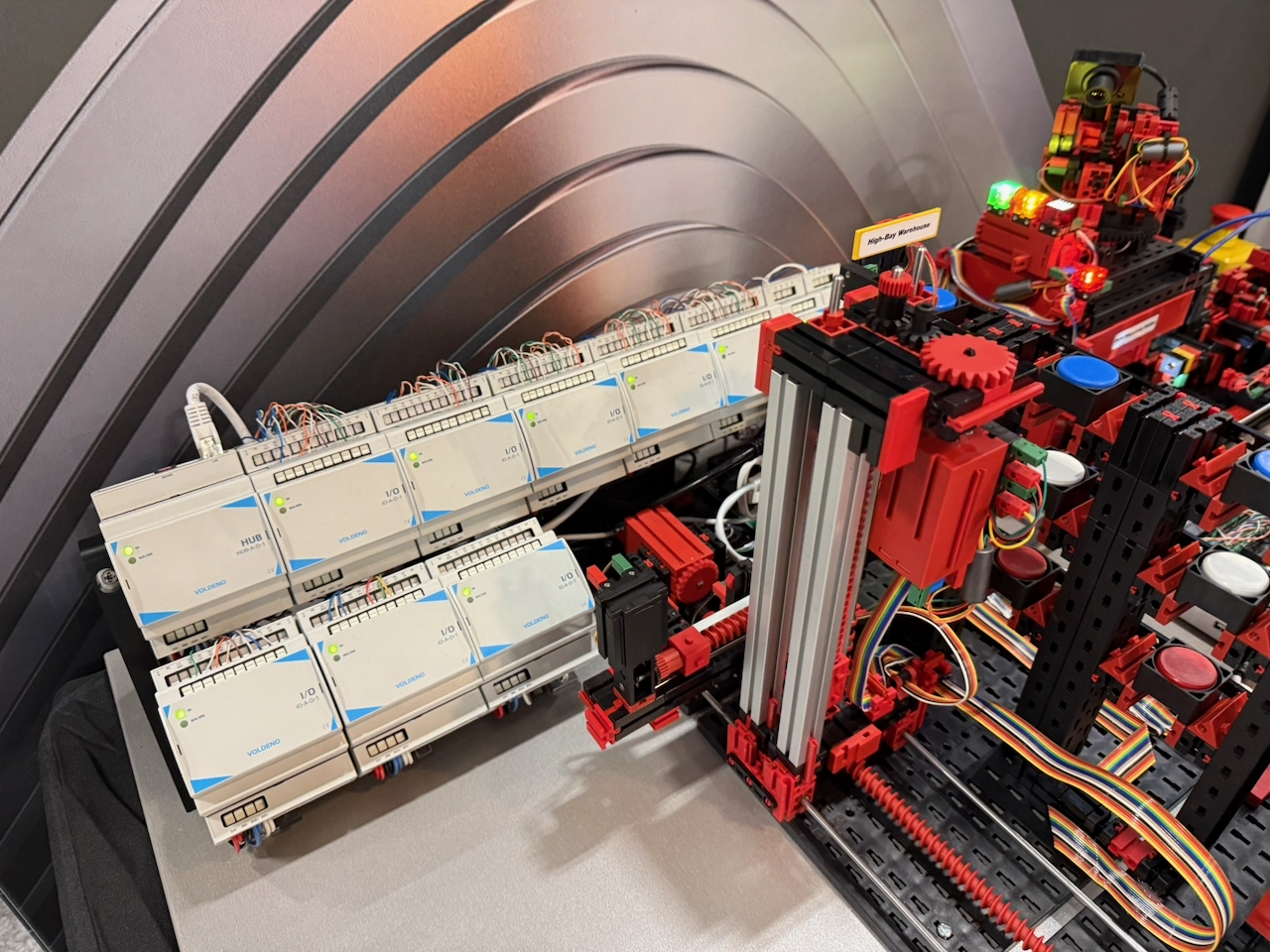
Zu den Vorführungen auf der Ausstellungsfläche gehörte ein vernetztes Fabrikmodell auf Basis des Bausatzes Fischertechnik Training Factory Industry 4.0 24V. Jede Bewegung, jeder Sensorwert und jedes I/O-Ereignis wurde in Echtzeit über Pub/Sub an Google Manufacturing Data Engine gestreamt. Die Steuerung der Fabrik und die Brücke zu Google Cloud liefen auf Voldeno-Modulen.
Der Kern dieses Beitrags: Dieselbe Hardware, die in Wohn- und Gewerbeverteilungen landet, steuerte auch encoderbasierte Positionierung, Kompressoren, Vakuumventile und Dutzende Sensoren mit einer Präzision, die sonst der Industrieautomation vorbehalten ist. Ein Hub, acht I/O-Module, ein ANALOG INPUT, ein 1-WIRE-Modul. Das war der gesamte Aufbau auf der Fabrikseite.
# Die Fabrik auf der Ausstellungsfläche
Der Bausatz ist die Fischertechnik Training Factory Industry 4.0 24V (Modell 554868), dieselbe Lernanlage, die Universitäten und industrielle Entwicklungsabteilungen zur Vermittlung von Industrie 4.0 einsetzen. Die 24V-Variante wird mit Adapterplatinen für den Anschluss an eine SPS geliefert, und genau diese Ebene haben wir ersetzt.
Fünf Stationen decken einen vollständigen Produktionszyklus ab:
- HBW, Hochregallager lagert Werkstücke ein und aus. Separate Achsen treiben ein Förderband, eine horizontale Achse zum Regal und zurück, eine vertikale Achse und einen ausfahrenden Ausleger an. Jede Achse verfügt über einen Impulsgeber und einen Referenzschalter.
- VGR, Vakuum-Greifroboter nimmt Werkstücke auf und setzt sie ab, auf drei Achsen (vertikal, horizontal, Rotation), mit einem Kompressor, einem Vakuumventil und drei Encodern.
- MPO, Multibearbeitungsstation vereint einen Ofen, eine Säge, ein Förderband, einen Drehtisch und eine Vakuum-Handhabung zwischen Ofen und Drehtisch. Fünf Motoren, vier Pneumatikventile und die Ofenbeleuchtung.
- SLD, Sortierstrecke mit Farberkennung arbeitet mit einem analogen 0-10-V-Farbsensor, drei Lichtschranken an den Auswurffächern (weiß, rot, blau) und drei Auswurfventilen. Werkstücke werden nach Farbe in Fächer sortiert.
- SSC, Sensorstation mit Kamera steuert einen zweiachsigen Kamerakopf, einen 0-10-V-Farbsensor, zwei Lichtschranken für Ein- und Auslagerung sowie Anzeige- und Status-LEDs.
Das ist kein beiläufiges Gadget. Der Bausatz ist eine ernsthafte Lehr- und Entwicklungsplattform, die über Industriedistributoren vertrieben wird. Die SPS-Ebene durch Voldeno-Module zu ersetzen, war ein bewusster Test, ob unser System dort bestehen kann, wo sonst eine Siemens S7-1500 sitzt.

# Was die Voldeno-Module ansteuerten
Die Voldeno-Hardware war auf einer DIN-Schiene montiert:
- 1× HUB für die Verteilung der Logik, Ethernet, Fernaktualisierungen und den Kanal zu Google Cloud.
- 8× I/O für insgesamt 64 digitale Eingänge und 64 Relaisausgänge in zwei galvanisch getrennten Gruppen je Modul.
- 1× 1-WIRE mit fünf im Bausatz verteilten SEN1WT3-Temperatursensoren.
- 1× ANALOG INPUT für die beiden 0-10-V-Farbsensoren an SLD und SSC.
Das I/O-Budget je Station, direkt aus dem Belegungsplan von Fischertechnik übernommen:
| Station | Eingänge (Sensoren / Schalter / Encoder) | Ausgänge (Motoren / Ventile / Leuchten) | Analog |
|---|---|---|---|
| HBW | 4 Referenzschalter, 2 Lichtschranken, 4 Encoderimpulse (2 Achsen) | Förderband (M1), horizontal zum Regal (M2), vertikal (M3), Ausleger (M4) mit Richtungssteuerung | - |
| VGR | 3 Referenzschalter, 6 Encoderimpulse (3 Achsen) | vertikal (M1), horizontal (M2), Rotation (M3) mit Richtungssteuerung, Kompressor, Vakuumventil | - |
| MPO | 7 Referenzschalter, 2 Lichtschranken (Bandende und Ofen) | Drehtisch (M1), Förderband (M2), Säge (M3), Ofenschieber (M4), Handhabung (M5), Ofenbeleuchtung, Kompressor, 4 Ventile (Vakuum, Absenken, Ofentür, Schieber) | - |
| SLD | 1 Impulstaster, 5 Lichtschranken (Eingang, nach Farberkennung, weiß, rot, blau) | Förderband, Kompressor, 3 Auswurfventile (weiß, rot, blau) | A4: 0-10-V-Farbsensor |
| SSC | 2 Referenzschalter, 2 Lichtschranken, 4 Encoderimpulse (2 Achsen) | vertikal (M1), Rotation (M2) mit Richtungssteuerung, 3 Status-LEDs, 1 Online-LED | A1: 0-10-V-Farbsensor |
Über die fünf Stationen hinweg sind das rund 42 digitale Eingänge, 43 digitale Ausgänge, zwei analoge Kanäle und fünf 1-Wire-Temperaturmesspunkte. Jedes I/O-Modul stellt 8 digitale Eingänge (mit optionalem Impulszählermodus) und 8 Relaisausgänge in zwei galvanisch getrennten Vierergruppen bereit. Der Impulszählermodus erlaubt es, die Positionsencoder jeder Achse ohne eine eigene Motion-Control-Karte auszulesen.
Motoren, die der ursprüngliche Fischertechnik-Aufbau per PWM in der Drehzahl regelt, werden in diesem Aufbau nur über die Relaisausgänge des I/O-Moduls ein- und ausgeschaltet. Volle Drehzahl vorwärts oder rückwärts genügt, um jede Achse in die von einem Encoder und einem Referenzschalter angezeigte Position zu bringen.
# Echtzeit zu Google Cloud, direkt vom Hub
Jede Zustandsänderung in der Fabrik wurde in ein Pub/Sub-Topic veröffentlicht. Der Weg von der Edge in die Cloud sieht so aus:
- Ein I/O-Ereignis (Eingangswechsel, Ausgangsschaltung, Farbmessung, Encoderimpuls, Temperaturaktualisierung) erreicht einen Logikbaustein, der lokal auf dem Hub läuft.
- Der Logikbaustein PubSub::Publish formatiert das Ereignis, kodiert es in Base64 und legt es in einem internen Puffer ab.
- Sobald die Grenze für Stapelgröße oder Stapel-Timeout erreicht ist (typischerweise 10 Nachrichten oder 1 Sekunde), signiert der Baustein ein JWT, tauscht es bei
oauth2.googleapis.com/tokengegen ein OAuth2-Zugriffstoken und veröffentlicht den Stapel über HTTPS anpubsub.googleapis.com/v1/projects/.../topics/...:publish. - Google Pub/Sub verteilt die Ereignisse an Google Manufacturing Data Engine, das sie normalisiert, mit dem Anlagenmodell verknüpft und an BigQuery sowie nachgelagerte Dashboards weiterleitet.
Diese Architektur streicht erhebliche Posten aus der Stückliste. Kein separater Raspberry Pi mit Node-RED. Kein MQTT-Broker. Kein OPC-UA-Gateway. Keine HTTP-zu-Pub/Sub-Brücke. Der Hub spricht Pub/Sub direkt, über einen TLS-gesicherten HTTPS-Kanal, mit automatisch zwischengespeicherten und erneuerten OAuth2-Token.
Für den Betrieb ist der Gewinn ebenso wichtig. Die lokale Steuerlogik bleibt lokal. Fällt das WAN aus, läuft die Fabrik weiter. Der PubSub::Publish-Baustein puffert die Ereignisse weiter und sendet sie bei nächster Gelegenheit erneut, mit einer konfigurierbaren Obergrenze, damit der Puffer nicht unbegrenzt wächst. Die Cloud sieht im Normalbetrieb einen kontinuierlichen Strom und nach einer Wiederherstellung einen nachgeführten Strom, ohne zusätzliche Infrastruktur.
Der vollständige Quellcode des Bausteins PubSub::Publish ist in unserer Dokumentation veröffentlicht, einschließlich JWT-Signierung, OAuth2-Caching, Stapelverarbeitung und Auswertung der HTTP-Antworten. Er läuft als normales Volang im Hub.
# Umfang der Automatisierungslogik
Das Projekt hinter der Demo enthielt Hunderte Logikbausteine und mehr als tausend Verbindungen zwischen ihnen. Die Bausteine übernehmen Encoderzählung, Motorrichtungssteuerung, Ablaufsteuerung der Handhabung, Koordination zwischen den Stationen, Entprellung der Lichtschranken, Schwellwerte der Farbsensoren, Fehlerbehandlung und den oben beschriebenen Pub/Sub-Veröffentlichungspfad.
Positionsbasierte Bewegung mit Impulsencodern und engem Schalt-Timing ist ein Profil, das üblicherweise eine SPS mit eigenen Achsbaugruppen liefert. Der Voldeno Bus, der Impulszähler des I/O-Moduls und das deterministische Timing des Hubs genügten, um dieselbe Aufgabe im selben Ökosystem zu bewältigen, das wir für Wohnhäuser und kleine Gewerbegebäude ausliefern.
Alles wurde in Voldeno Studio entworfen und mit einem einzigen Deploy auf den Hub übertragen. Aktualisierungen während der Messe erforderten keinen physischen Zugriff auf die Anlage; der Hub übernahm sie über das Netzwerk.
# Vom Smart Home in die Fabrikhalle

Dieselben Module, die in Wohn- und Gewerbeverteilungen sitzen, trieben eine Demo für eine Veranstaltung an, die von Unternehmen mit Jahresumsätzen in zweistelliger und dreistelliger Milliardenhöhe besucht wurde. Acht I/O-Module. Vierundsechzig Eingangskanäle und vierundsechzig Ausgangskanäle. Fünf Stationen. Rund fünfundachtzig gleichzeitige I/O-Ereignisse. Pub/Sub über HTTPS, direkt vom Hub gesendet. Die Logik läuft lokal auf einem 4 TE breiten Controller.
Was das über das Produkt aussagt: Voldeno Bus und Voldeno Studio sind nicht auf Lichtszenen und Heizpläne beschränkt. Dasselbe System bewältigt positionsbasierte Bewegungssteuerung, Cloud-Anbindung auf Industrieniveau und präzises Timing. Für die typischeren Anwendungen unserer Kunden von heute (Installationen im Wohnbereich, Heizräume, Bewässerung, GLT-Anbindung auf kleineren Gewerbeobjekten) ist die Fischertechnik-Demo ein Beleg von oben herab. Wenn das System eine Industrie-4.0-Anlage bewältigt, hat es reichlich Reserven für eine Hausverteilung.
# Bauen Sie es selbst nach
Wenn Sie denselben Ablauf auf Ihrer eigenen Hardware ausprobieren möchten:
- Voldeno Studio steht kostenlos zum Download bereit. Erstellen Sie eigene Logikbausteine, konfigurieren Sie I/O-Module und richten Sie einen Pub/Sub-Stream zu Google Cloud ein. Legen Sie auf der Download-Seite los.
- Sprechen Sie mit dem Team. Möchten Sie eine solche Demo für eine Messe, ein Universitätslabor oder einen echten industriellen Einsatz mit HTTPS direkt zu GCP? Kontaktieren Sie uns. Für Installateure und Integratoren führt die Seite für Fachbetriebe den Partnerweg.