
Osiem modułów I/O, jeden Hub i integracja przez Pub/Sub do Google Cloud w czasie rzeczywistym po HTTPS. Jak moduły Voldeno sterowały wszystkimi silnikami i czujnikami w demie Fischertechnik Training Factory dla Google Manufacturing Data Engine w Las Vegas.
# System Voldeno napędził demo fabryki Fischertechnik na Google Cloud Next '26

Google Cloud Next '26 odbył się w Las Vegas między 22 a 24 kwietnia 2026, gromadząc ponad 32 000 uczestników, 700 sesji breakout i 490 sponsorów. Hasłem przewodnim był „agentic enterprise": stawianie przez Google na agentów AI, którzy działają w imieniu organizacji w obszarze oprogramowania, danych i operacji fizycznych.

Wśród demonstracji na sali targowej znalazł się model „connected factory" zbudowany na zestawie Fischertechnik Training Factory Industry 4.0 24V. Cały ruch fabryki, każdy odczyt czujnika i każde zdarzenie IO było wysyłane w czasie rzeczywistym do Google Manufacturing Data Engine przez Pub/Sub. Orkiestrację fabryki i pomost do Google Cloud zrealizowano na modułach Voldeno.
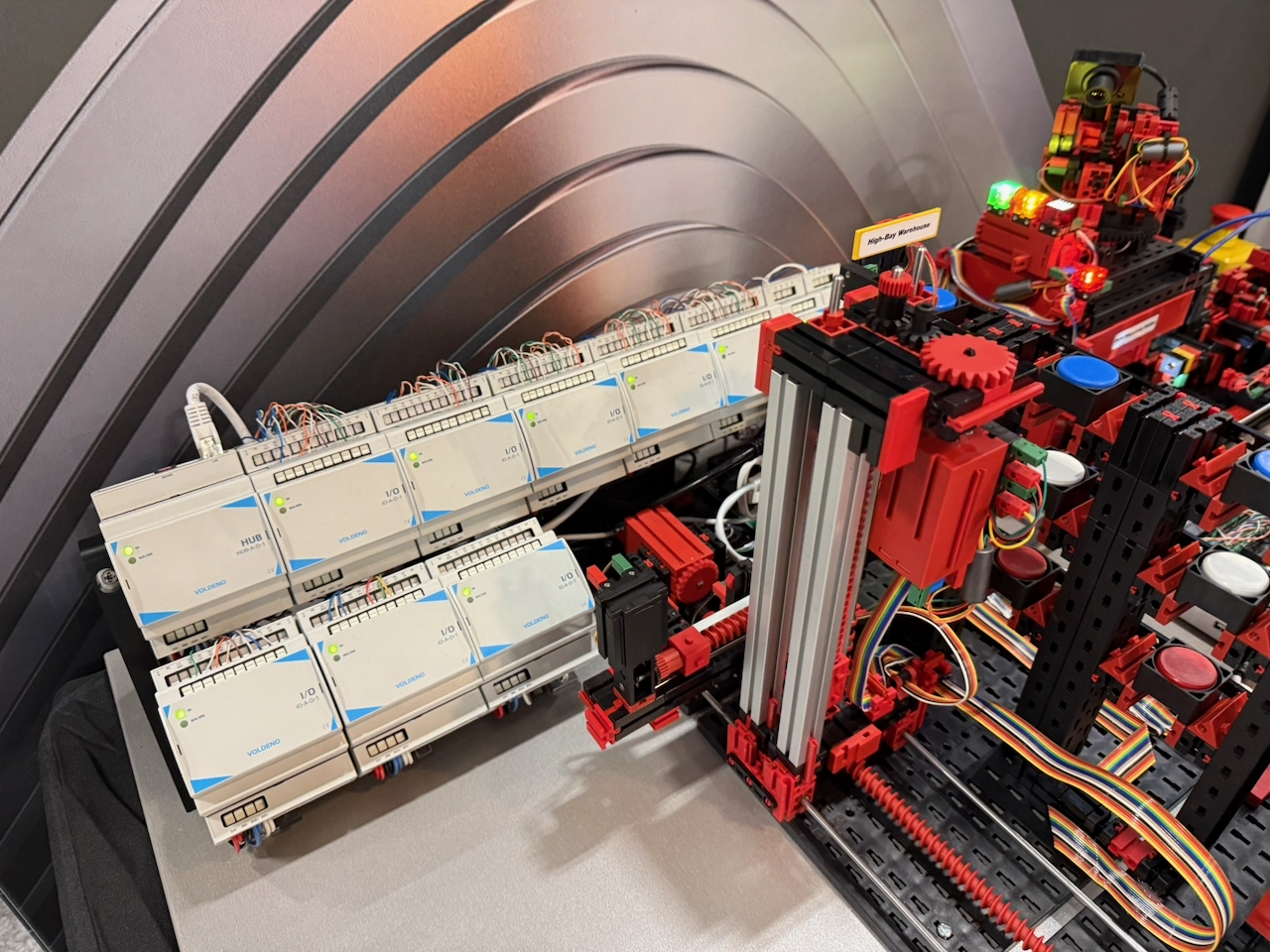
W skrócie: ten sam sprzęt, który trafia do rozdzielnic w domach i komercyjnych budynkach, sterował tu silnikami pozycyjnymi z enkoderami, kompresorami, zaworami podciśnieniowymi i kilkudziesięcioma czujnikami z dokładnością właściwą dla automatyki przemysłowej. Po stronie fabryki cały sprzęt sprowadzał się do jednego Huba, ośmiu modułów I/O, jednego ANALOG INPUT i jednego 1-WIRE.
# Fabryka na sali targowej
Zestaw to Fischertechnik Training Factory Industry 4.0 24V (model 554868), używany na uczelniach i w działach R&D firm produkcyjnych do nauki Industry 4.0. Wersja 24 V dostarczana jest z adapter boardami pod sterowniki PLC i to one zostały zastąpione przez moduły Voldeno.
Pięć stacji obejmuje pełen cykl produkcyjny:
- HBW, High Bay Warehouse odpowiada za składowanie i pobieranie detali. Osobne osie napędzają taśmociąg, oś poziomą do regału i z powrotem, oś pionową oraz wysuwany wysięgnik. Każda oś ma enkoder pulsacyjny i krańcówkę.
- VGR, Vacuum Gripper Robot to manipulator próżniowy na trzech osiach (pionowa, pozioma, obrót), z kompresorem, zaworem próżniowym i trzema enkoderami.
- MPO, Multi-Processing Station łączy piec, piłę, taśmociąg, stół obrotowy i manipulator próżniowy między piecem a obrotnicą. Pięć silników, cztery zawory pneumatyczne i oświetlenie pieca.
- SLD, Sorting Line with color Detection używa analogowego czujnika koloru 0-10 V, trzech barier świetlnych na slotach (biały, czerwony, niebieski) i trzech zaworów wyrzutowych. Detale są sortowane do pojemników po kolorze.
- SSC, Sensor Station with Camera napędza dwuosiową głowicę kamery, czujnik koloru 0-10 V, dwie bariery świetlne (storage i retrieval) oraz wskaźniki LED i status online.
To nie jest tani gadżet. Zestaw jest poważną platformą szkoleniowo-badawczą, sprzedawaną przez dystrybutorów przemysłowych. W oryginalnej konfiguracji ruch maszyn obsługuje sterownik PLC (typowo z rodziny Siemens S7-1500), a logika nadrzędna i komunikacja z chmurą wymagają osobnego Raspberry Pi z dedykowanym kodem. Co więcej, integracja z Pub/Sub w domyślnym wariancie z PLC w ogóle nie istnieje, trzeba ją dopisać samodzielnie. Moduły Voldeno przejęły obie warstwy naraz: sterowanie polowe i logikę nadrzędną z publikacją do Google Cloud. Niższym kosztem, bez niskopoziomowego programowania i z szerszym zakresem zadań niż oryginalna konfiguracja.

# Co sterowały moduły Voldeno
Sprzęt Voldeno zamontowano na szynie DIN:
- 1× HUB do wgrywania logiki, połączenia Ethernet, zdalnych aktualizacji i komunikacji z Google Cloud.
- 8× I/O, razem 64 wejścia cyfrowe i 64 wyjścia przekaźnikowe w dwóch izolowanych grupach na moduł.
- 1× 1-WIRE z pięcioma czujnikami temperatury SEN1WT3 rozłożonymi po zestawie.
- 1× ANALOG INPUT dla dwóch czujników koloru 0-10 V (SLD i SSC).
Budżet IO per stacja, prosto z dokumentacji Fischertechnik:
| Stacja | Wejścia (czujniki / krańcówki / enkodery) | Wyjścia (silniki / zawory / inne) | Analog |
|---|---|---|---|
| HBW | 4 krańcówki, 2 bariery świetlne, 4 pulsy enkoderów (2 osie) | M1 taśmociąg, M2 pozioma do regału, M3 pionowa, M4 wysięgnik (sterowanie kierunkowe) | - |
| VGR | 3 krańcówki, 6 pulsów enkoderów (3 osie) | M1 pionowa, M2 pozioma, M3 obrót (sterowanie kierunkowe), kompresor, zawór próżniowy | - |
| MPO | 7 krańcówek, 2 bariery świetlne (koniec taśmy i piec) | M1 obrotnica, M2 taśmociąg, M3 piła, M4 wysuwnik pieca, M5 manipulator, światło pieca, kompresor, 4 zawory (próżnia, opuszczanie, drzwi pieca, brama) | - |
| SLD | 1 przycisk, 5 barier świetlnych (wejście, za czujnikiem koloru, biały, czerwony, niebieski) | taśmociąg, kompresor, 3 zawory wyrzutowe (biały, czerwony, niebieski) | A4: czujnik koloru 0-10 V |
| SSC | 2 krańcówki, 2 bariery świetlne, 4 pulsy enkoderów (2 osie) | M1 pionowa, M2 obrót (sterowanie kierunkowe), 3 LED statusowe, 1 LED online | A1: czujnik koloru 0-10 V |
W sumie po pięciu stacjach to około 42 wejścia cyfrowe, 43 wyjścia cyfrowe, dwa kanały analogowe i pięć punktów temperaturowych 1-Wire. Każdy moduł I/O daje 8 wejść cyfrowych (z opcjonalnym trybem licznika częstotliwości) i 8 wyjść przekaźnikowych w dwóch izolowanych grupach po cztery. Tryb licznika częstotliwości pozwala czytać enkodery pozycyjne na każdej osi bez dedykowanej karty motion control.
Silniki, które w referencyjnej konfiguracji Fischertechnik wykorzystują PWM do regulacji prędkości, w tym wdrożeniu są sterowane wyłącznie wł/wył przez wyjścia przekaźnikowe modułów I/O. Pełna prędkość w wybranym kierunku wystarczy, żeby doprowadzić oś do pozycji wskazanej przez enkoder i krańcówkę.
# Real-time do Google Cloud prosto z modułu Voldeno Hub
Każda zmiana stanu na hali była publikowana do tematu Pub/Sub. Ścieżka edge-to-cloud wygląda tak:
- Zdarzenie IO (zmiana wejścia, przełączenie wyjścia, odczyt koloru, puls enkodera, aktualizacja temperatury) trafia do bloku logiki działającego lokalnie na Hubie.
- Blok PubSub::Publish formatuje zdarzenie, koduje je w base64 i dokłada do wewnętrznego bufora.
- Po przekroczeniu rozmiaru wsadu albo timeoutu (typowo 10 wiadomości albo 1 sekunda) blok podpisuje JWT, wymienia go na token OAuth2 z
oauth2.googleapis.com/tokeni publikuje batch dopubsub.googleapis.com/v1/projects/.../topics/...:publishpo HTTPS. - Google Pub/Sub rozsyła zdarzenia do Google Manufacturing Data Engine, który normalizuje je, koreluje z modelem assetów i przekazuje do BigQuery i dashboardów.
Taka architektura znacząco upraszcza listę komponentów (BOM). Nie potrzeba osobnego Raspberry Pi z Node-RED, brokera MQTT, bramki OPC UA ani mostka z HTTP do Pub/Sub. Hub komunikuje się z Pub/Sub bezpośrednio po HTTPS z TLS, a tokeny OAuth2 są automatycznie buforowane i odświeżane.
Równie istotne są konsekwencje operacyjne. Logika sterowania pozostaje na Hubie, niezależnie od stanu połączenia. Utrata łącza WAN nie zatrzymuje pracy fabryki: blok PubSub::Publish dalej zapisuje zdarzenia w buforze i ponawia publikację po odzyskaniu sieci, z konfigurowalnym limitem, który zabezpiecza przed niekontrolowanym wzrostem bufora. Chmura otrzymuje ciągły strumień podczas normalnej pracy oraz strumień uzupełniony po przywróceniu łączności, bez dodatkowej obsługi po stronie sprzętu.
Pełny kod bloku PubSub::Publish jest opublikowany w naszej dokumentacji: podpis JWT, cache tokenu OAuth2, batching i obsługa odpowiedzi HTTP. Wszystko działa jako standardowy Volang wewnątrz Huba.
# Skala logiki automatyzacji
Projekt napędzający demo zawierał setki bloków logiki i ponad tysiąc połączeń między nimi. Bloki obsługiwały zliczanie pulsów enkoderów, sterowanie kierunkiem silników, sekwencje pick-and-place, koordynację między stacjami, debouncing barier świetlnych, progi czujników koloru, obsługę błędów i opisaną wyżej publikację zdarzeń do Pub/Sub.
Sterowanie pozycyjne z enkoderami pulsacyjnymi i precyzyjnym taktowaniem przełączeń to profil zwykle realizowany na sterownikach PLC z dedykowanymi kartami osi. Voldeno Bus, tryb licznika impulsów na wejściach modułu I/O oraz deterministyczne taktowanie Huba w pełni wystarczyły, aby obsłużyć ten sam zakres zadań w ekosystemie, który dostarczamy do domów i mniejszych obiektów komercyjnych.
Cała konfiguracja powstała w Voldeno Studio i została wdrożona na Hubie jednym poleceniem.
# Od smart home do hali produkcyjnej

Te same moduły, które trafiają do rozdzielnic w prywatnych domach i komercyjnych budynkach, napędziły demo dla wydarzenia z udziałem firm o rocznych przychodach idących w dziesiątki i setki miliardów dolarów. Osiem modułów I/O. Sześćdziesiąt cztery kanały wejściowe i sześćdziesiąt cztery wyjściowe. Pięć stacji. Około osiemdziesięciu pięciu zdarzeń IO równolegle. Pub/Sub po HTTPS, prosto z modułu Voldeno Hub. Logika lokalnie na sterowniku szerokości czterech modułów DIN.
Co to oznacza dla produktu: Voldeno Bus i Voldeno Studio nie ograniczają swoich możliwości do scen oświetleniowych i harmonogramów ogrzewania. Ta sama platforma obsługuje sterowanie pozycyjne, integrację z chmurą przemysłową i precyzyjne taktowanie zdarzeń. Dla bardziej typowych zastosowań naszych klientów (instalacje domowe, kotłownie, nawadnianie, integracje BMS w mniejszych obiektach komercyjnych) demonstracja na Fischertechniku jest argumentem „od góry": skoro platforma sprawdza się w realiach Industry 4.0, to z domową rozdzielnicą poradzi sobie z zapasem.
# Zbuduj to u siebie
Jeśli chcesz odtworzyć podobny scenariusz na własnym sprzęcie:
- Voldeno Studio jest do pobrania za darmo. Zbuduj własne bloki logiki, skonfiguruj moduły I/O, wystaw strumień Pub/Sub do Google Cloud. Zacznij na stronie pobierania.
- Porozmawiaj z zespołem. Chcesz takie demo na targi, wykład akademicki albo realne wdrożenie przemysłowe z HTTPS prosto do GCP? Skontaktuj się. Dla integratorów i partnerów: Strefa profesjonalistów.