
Eight I/O modules, one Hub, and Pub/Sub integration with Google Cloud in real time over HTTPS. How Voldeno modules drove every motor and sensor of the Fischertechnik Training Factory demo for Google Manufacturing Data Engine in Las Vegas.
# Voldeno powered the Fischertechnik factory demo at Google Cloud Next '26

Google Cloud Next '26 took place in Las Vegas from April 22 to 24, 2026, with more than 32,000 attendees, 700+ breakout sessions, and 490+ sponsors. The headline theme was the agentic enterprise: Google's bet on AI agents that act on behalf of organizations across software, data, and physical operations.

Among the demonstrations on the show floor was a connected-factory model built on the Fischertechnik Training Factory Industry 4.0 24V kit. All motion, every sensor reading, and each I/O event was streamed in real time to Google Manufacturing Data Engine through Pub/Sub. The orchestration of the factory and the bridge to Google Cloud ran on Voldeno modules.
The point of this post: the same hardware that lands in residential and commercial distribution panels also drove encoder-based positioning, compressors, vacuum valves, and dozens of sensors with the precision typically reserved for industrial automation. One Hub, eight I/O modules, one ANALOG INPUT, one 1-WIRE module. That was the entire stack on the factory side.
# The factory on the show floor
The kit is the Fischertechnik Training Factory Industry 4.0 24V (model 554868), the same training rig used by universities and industrial R&D departments to teach Industry 4.0. The 24V variant ships with adapter boards designed for PLC connection, which is exactly the layer we replaced.
Five stations cover a complete production cycle:
- HBW, High Bay Warehouse stores and retrieves workpieces. Separate axes drive a conveyor belt, a horizontal axis to and from the rack, a vertical axis, and an extending cantilever. Each axis has a pulse encoder and a reference switch.
- VGR, Vacuum Gripper Robot picks and places workpieces on three axes (vertical, horizontal, rotation), with a compressor, a vacuum valve, and three encoders.
- MPO, Multi-Processing Station combines an oven, a saw, a conveyor, a turntable, and a vacuum pick-and-place between the oven and the turntable. Five motors, four pneumatic valves, and oven lighting.
- SLD, Sorting Line with color Detection runs an analog 0-10 V color sensor, three slot-level light barriers (white, red, blue), and three ejection valves. Workpieces are sorted into bins by color.
- SSC, Sensor Station with Camera drives a two-axis camera head, a 0-10 V color sensor, two storage and retrieval light barriers, plus indicator and status LEDs.
It is not a casual gadget. The kit is a serious teaching and R&D platform, sold through industrial distributors. Replacing its PLC layer with Voldeno modules was a deliberate test of whether our stack can sit where a Siemens S7-1500 would normally sit.

# What Voldeno modules drove
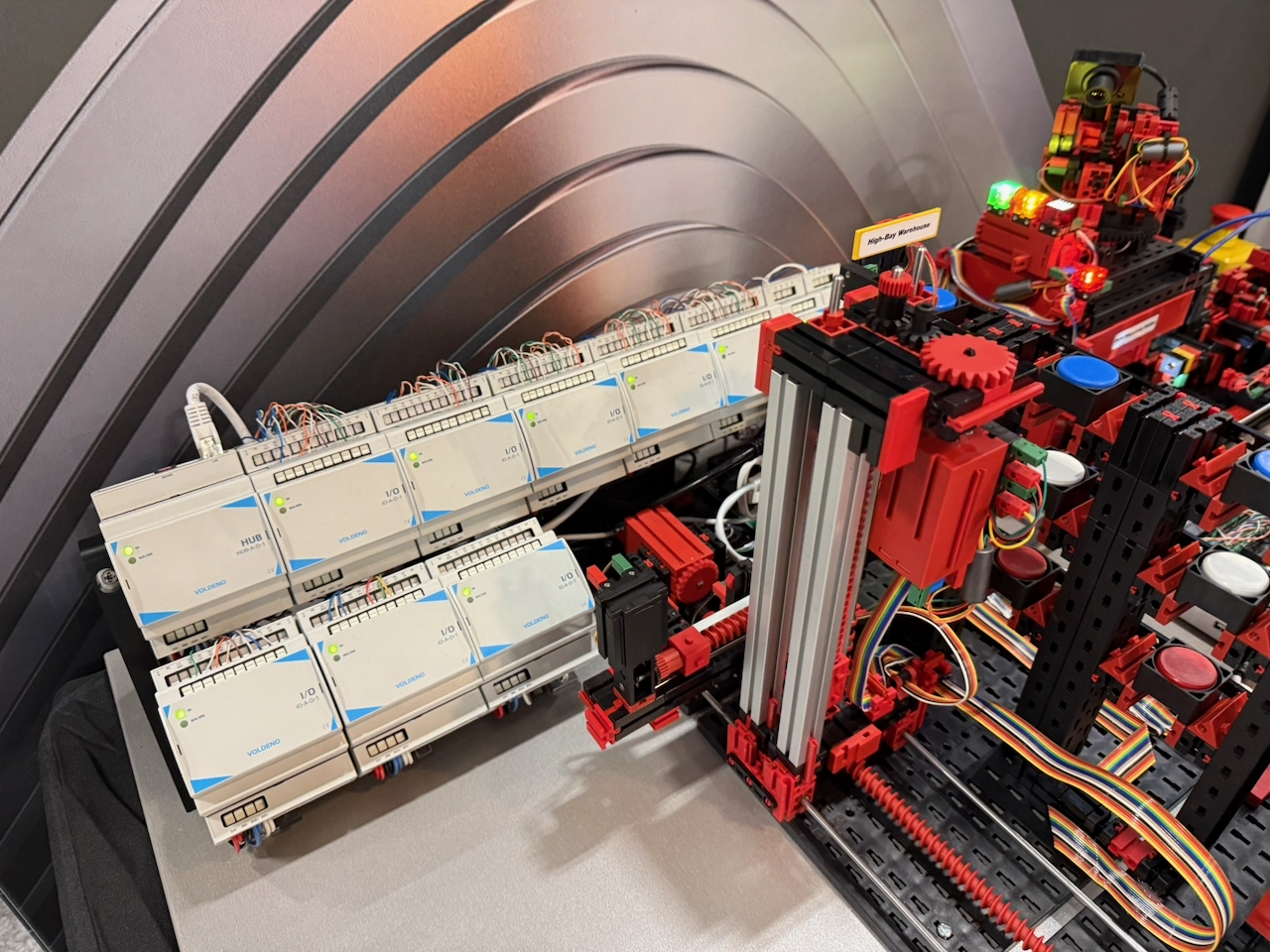
The Voldeno hardware was mounted on DIN rail:
- 1× HUB for logic deployment, Ethernet, remote updates, and the channel to Google Cloud.
- 8× I/O for a combined 64 digital inputs and 64 relay outputs in two isolated groups per module.
- 1× 1-WIRE carrying five SEN1WT3 temperature sensors placed across the kit.
- 1× ANALOG INPUT for the two 0-10 V color sensors on SLD and SSC.
The IO budget per station, taken straight from the Fischertechnik occupancy plan:
| Station | Inputs (sensors / switches / encoders) | Outputs (motors / valves / lights) | Analog |
|---|---|---|---|
| HBW | 4 reference switches, 2 light barriers, 4 encoder pulses (2 axes) | conveyor (M1), horizontal to rack (M2), vertical (M3), cantilever (M4) with bidirectional control | - |
| VGR | 3 reference switches, 6 encoder pulses (3 axes) | vertical (M1), horizontal (M2), rotation (M3) bidirectional, compressor, vacuum valve | - |
| MPO | 7 reference switches, 2 light barriers (belt end and oven) | turntable (M1), conveyor (M2), saw (M3), oven slide (M4), pick-and-place (M5), oven light, compressor, 4 valves (vacuum, lowering, oven door, gate) | - |
| SLD | 1 pulse button, 5 light barriers (input, after-color, white, red, blue) | conveyor, compressor, 3 ejection valves (white, red, blue) | A4: 0-10 V color sensor |
| SSC | 2 reference switches, 2 light barriers, 4 encoder pulses (2 axes) | vertical (M1), rotation (M2) bidirectional, 3 status LEDs, 1 online LED | A1: 0-10 V color sensor |
Across the five stations, that is roughly 42 digital inputs, 43 digital outputs, two analog channels, and five 1-Wire temperature points. Each I/O module exposes 8 digital inputs (with optional pulse-counter mode) and 8 relay outputs in two isolated groups of four. The pulse-counter mode is what lets us read the position encoders on each axis without a dedicated motion-control card.
Motors that the reference Fischertechnik setup drives with PWM for speed control are driven on/off only through the I/O module relay outputs in this build. Full-speed forward or reverse is enough to bring each axis to the position indicated by an encoder and a reference switch.
# Real-time to Google Cloud, straight from the Hub
Every state change on the factory floor was published to a Pub/Sub topic. The path from edge to cloud looks like this:
- An I/O event (input transition, output toggle, color reading, encoder tick, temperature update) reaches a logic block running locally on the Hub.
- The PubSub::Publish logic block formats the event, base64-encodes it, and adds it to an internal buffer.
- When the batch size or batch timeout limit is reached (typically 10 messages or 1 second), the block signs a JWT, exchanges it for an OAuth2 access token from
oauth2.googleapis.com/token, and publishes the batch topubsub.googleapis.com/v1/projects/.../topics/...:publishover HTTPS. - Google Pub/Sub fans the events out to Google Manufacturing Data Engine, which normalizes them, correlates them with the asset model, and forwards into BigQuery and downstream dashboards.
What this architecture removes from the bill of materials is significant. There is no separate Raspberry Pi running Node-RED. No MQTT broker. No OPC UA gateway. No HTTP-to-Pub/Sub bridge. The Hub speaks Pub/Sub directly, with a TLS-secured HTTPS channel and OAuth2 tokens cached and refreshed automatically.
What it removes from the operational story is just as relevant. Local control logic stays local. If the WAN drops, the factory keeps running. The PubSub::Publish block keeps buffering events and retries on the next opportunity, with a configurable cap so the buffer cannot grow unbounded. The cloud sees a continuous stream during normal operation and a backfilled stream after a recovery, without any extra plumbing.
The full source of the PubSub::Publish block is published in our docs, including the JWT signing flow, OAuth2 caching, batching, and HTTP response handling. It runs as standard Volang inside the Hub.
# Scale of the automation logic
The project that ran the demo contained hundreds of logic blocks and more than a thousand connections between them. Blocks handle encoder counting, motor direction control, pick-and-place sequencing, station-to-station coordination, light-barrier debouncing, color-sensor thresholds, error handling, and the Pub/Sub publication path described above.
Position-based motion with pulse encoders and tight switching timing is a profile usually delivered by a PLC with dedicated axis cards. The Voldeno Bus, the I/O module's pulse counter, and the deterministic timing on the Hub were enough to drive the same workload in the same ecosystem we ship to homes and small commercial buildings.
Everything was designed in Voldeno Studio and pushed to the Hub with a single deploy. Updates during the show did not require physical access to the rig; the Hub picked them up over the network.
# From smart home to factory floor

The same modules that sit in residential and commercial distribution panels powered a demo for an event attended by companies whose annual revenues run into the tens and hundreds of billions of dollars. Eight I/O modules. Sixty-four input channels and sixty-four output channels. Five stations. Around eighty-five concurrent IO events. Pub/Sub over HTTPS, sent straight from the Hub. Logic running locally on a 4 DIN-wide controller.
What this says about the product: Voldeno Bus and Voldeno Studio are not capped at lighting scenes and heating schedules. The same stack handles position-based motion control, industrial-grade cloud integration, and precise timing. For the more typical applications our customers run today (residential installations, boiler rooms, irrigation, BMS integration on smaller commercial sites) the Fischertechnik demo is a top-down proof point. If the stack delivers for an Industry 4.0 rig, it has plenty of headroom for a domestic distribution panel.
# Build it yourself
If you want to try the same flow on your own hardware:
- Voldeno Studio is free to download. Build your own logic blocks, configure I/O modules, and wire up a Pub/Sub stream to Google Cloud. Get started on the Downloads page.
- Talk to the team. Want a demo of this kind for a trade show, a university lab, or a real industrial deployment with HTTPS straight to GCP? Contact us. For installers and integrators, the Professionals page has the partnership track.